α-Z Letzte Aktualisierung: 2014-03-09
Elektronisches Getriebe für die Leitspindel der Drehmaschine
(Electronic Lead Screw)
Der Name α-Z ergibt sich aus dem Drehwinkel der Hauptspindel der Drehmaschine und der Z-Position des Bettschlittens
auf dem Drehmaschinenbett. Die Z-Position kann über die Leitspindel bestimmt werden. Die Leitspindel kann sich bei Bedarf über eine Kombination
von Zahnrädern in einem bestimmten Verhältnis zur Hauptspindel drehen. Die möglichen Übersetzungsverhältnisse sind durch die Kombinationsmöglichkeiten
dieser Wechsel(zahn)räder beschränkt.
Die Idee:
Ein Schrittmotor oder Servomotor übernimmt die Drehung der Leitspindel und wird dabei über eine Steuerelektronik mit Schrittimpulsen, die aus der Drehung der
Hauptspindel errechnet werden, versorgt. Die Hauptspindel erhält dazu einen Drehgeber.
Durch eine Steuerung über einen Mikroprozessor ergibt sich die Möglichkeit schnell beliebige Steigungen einzustellen. Anschläge können
gesetzt werden. Sieht man eine Spindelarretierung vor, so ersetzt die Winkelanzeige in Grenzen eine Teilscheibe an der Hauptspindel.
Ein gleichmäßiges Überdrehen kann manuell über eine Handsteuerung erleichtert werden.


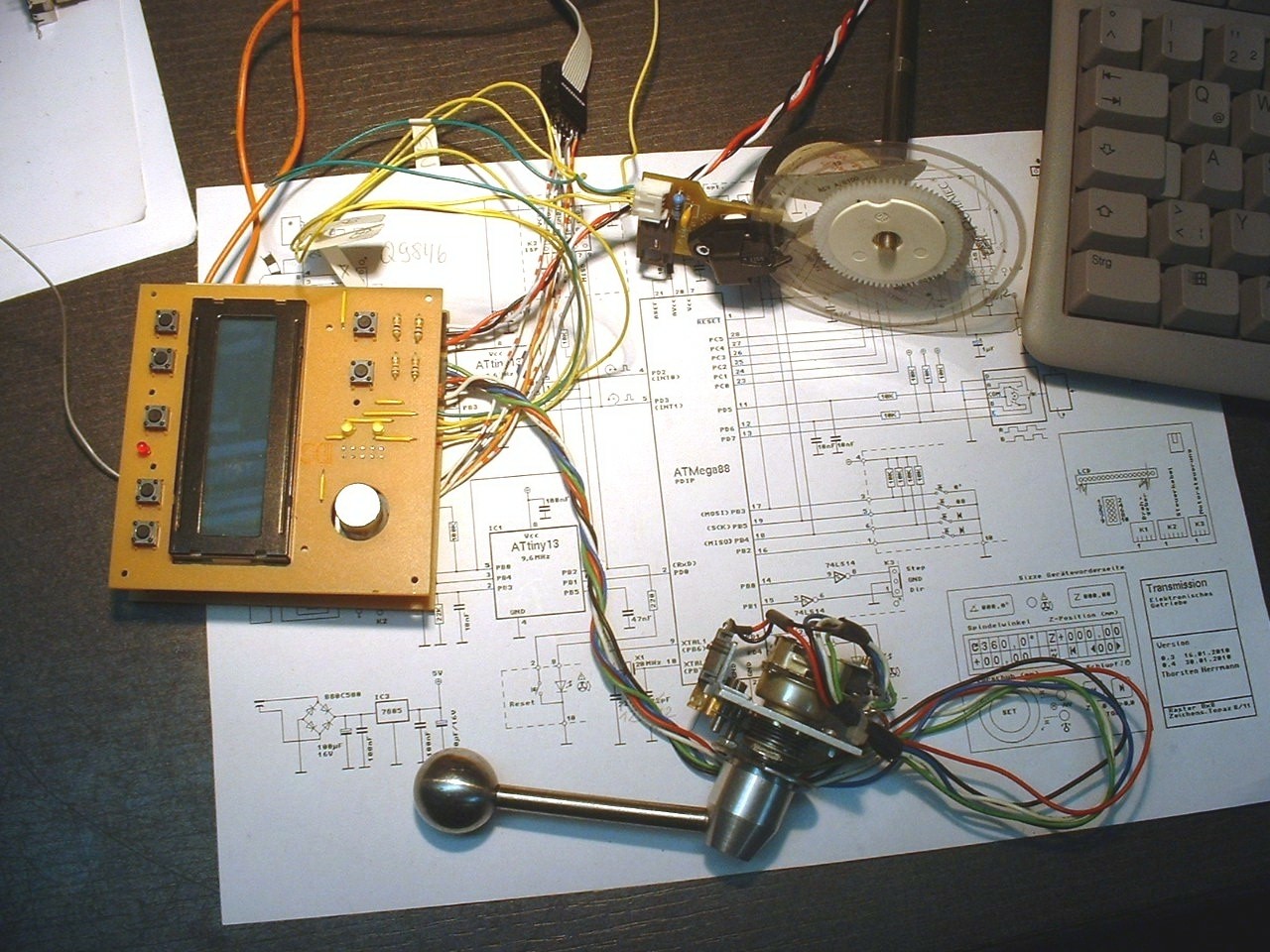
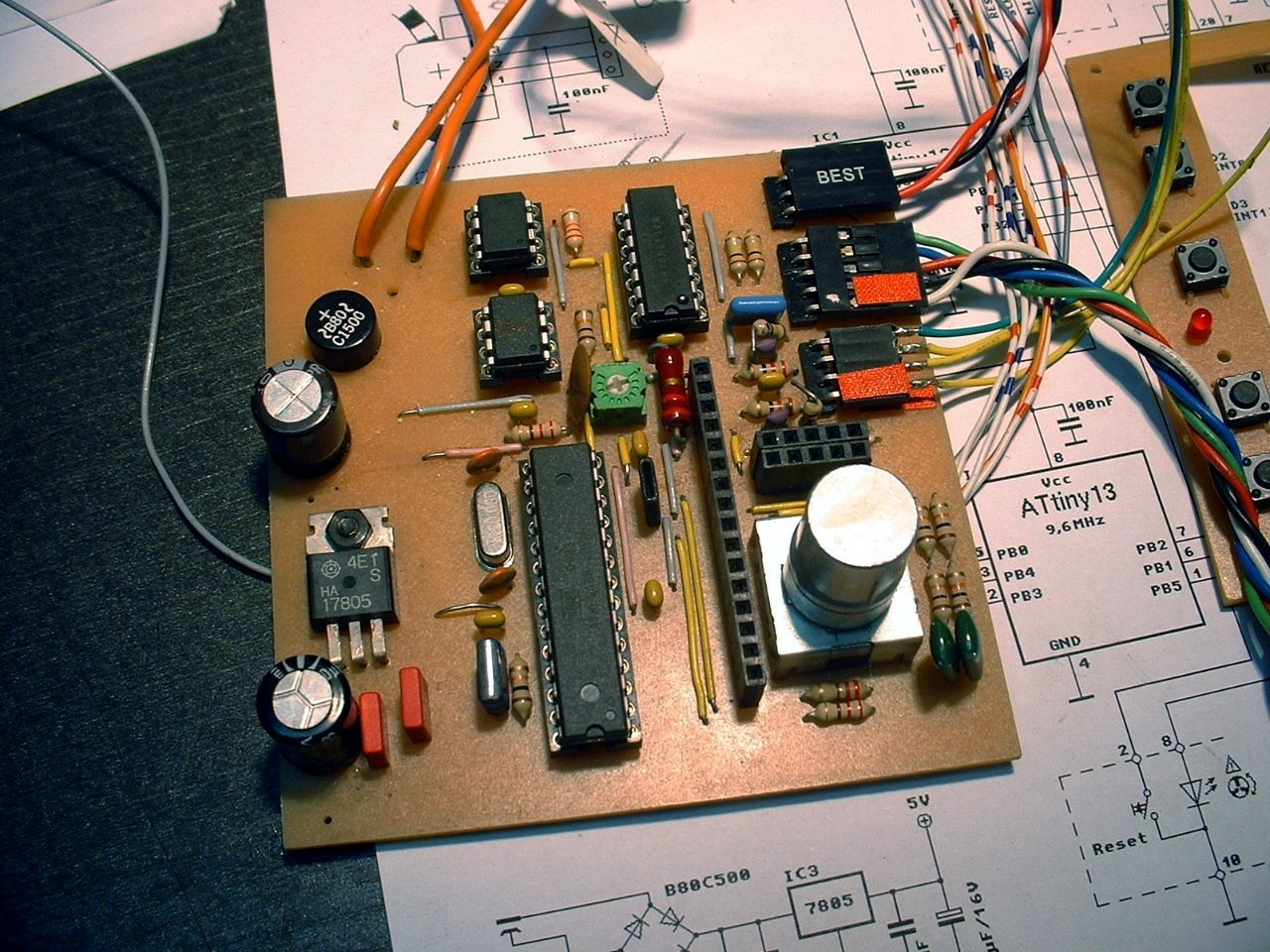
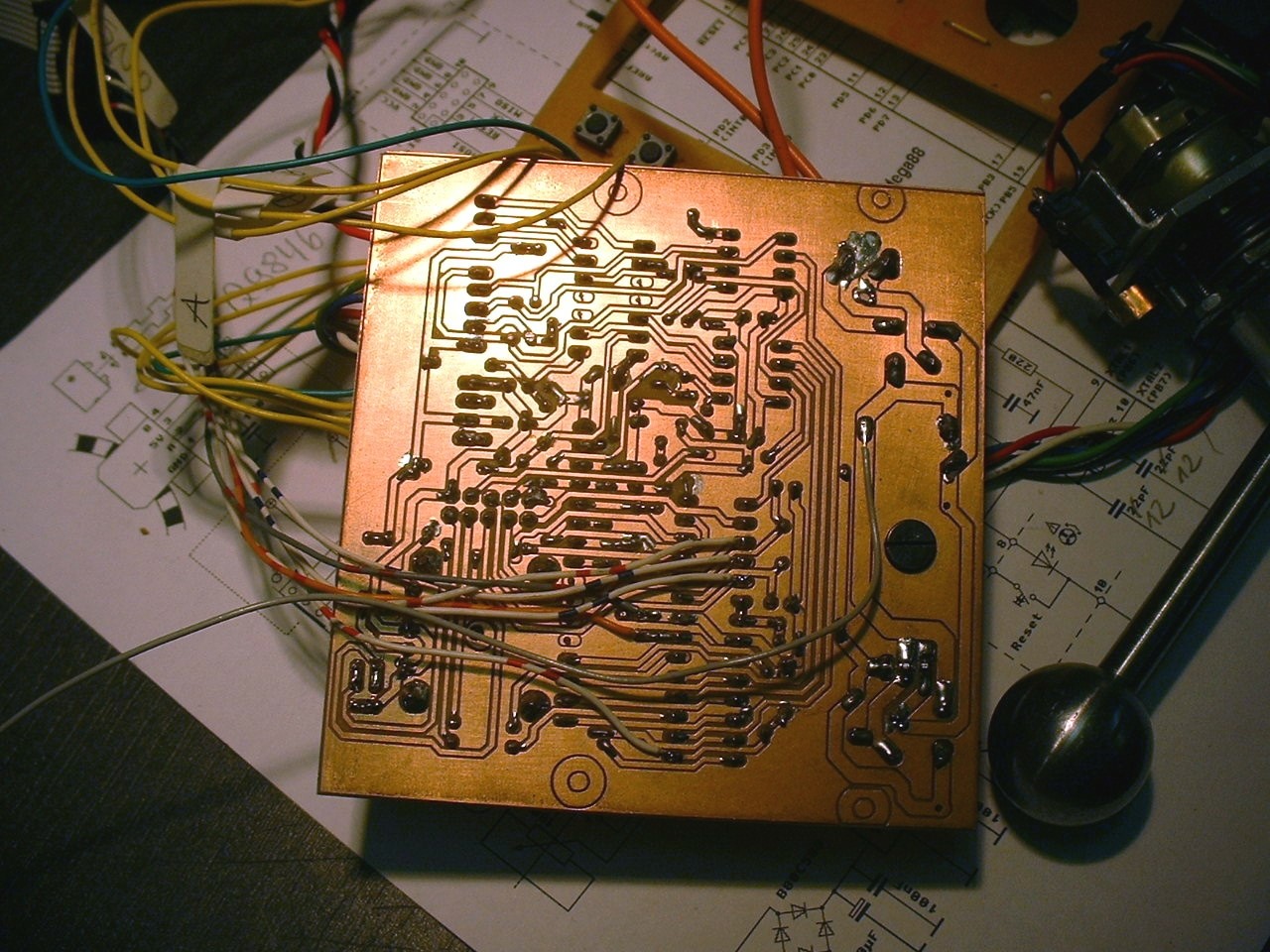
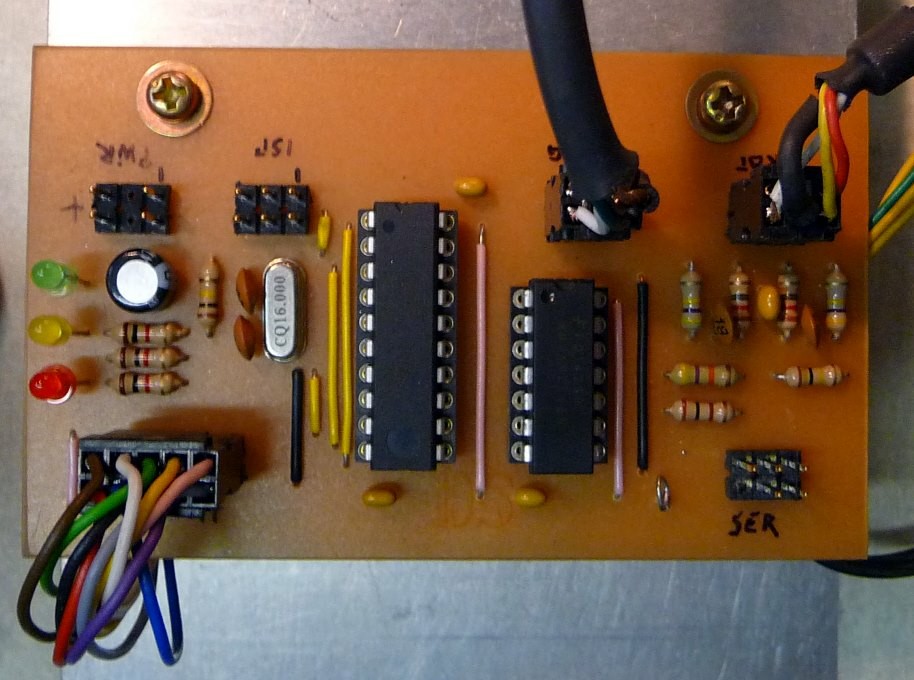
Die Steuerelektronik besteht im Wesentlichen aus drei Mikroprozessoren, 2 mal ATiny13 und einem ATmega88 (20MHz).
Die beiden kleinen Mikroprozessoren kümmern sich jeweils um den Drehgeber und die Handsteuerung. Die maximalen Grenzwerte
der Steuerung sind durch die Leistungsfähigkeit der ATmega begrenzt - daher die beiden kleinen ATiny-Helfer.

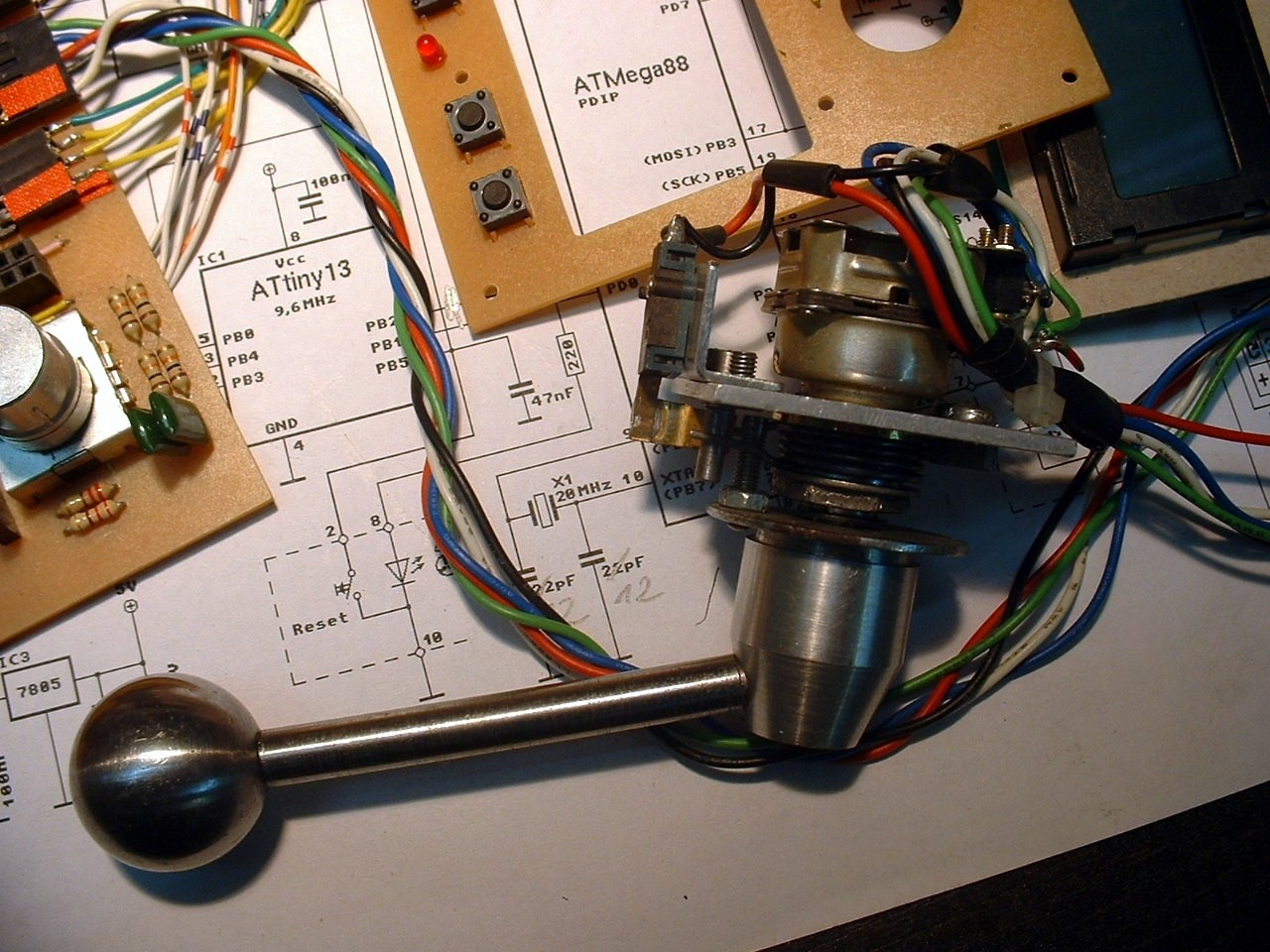
Der optische Drehgeber (obern rechts auf dem Bild) ist einem alten Drucker entnommen und bietet eine Auflösung von 7200 Impulsen pro Umdrehung.
Unten rechts der Steuerhebel, die Schrittmotoransteuerung liegt ausserhalb des Bildes.


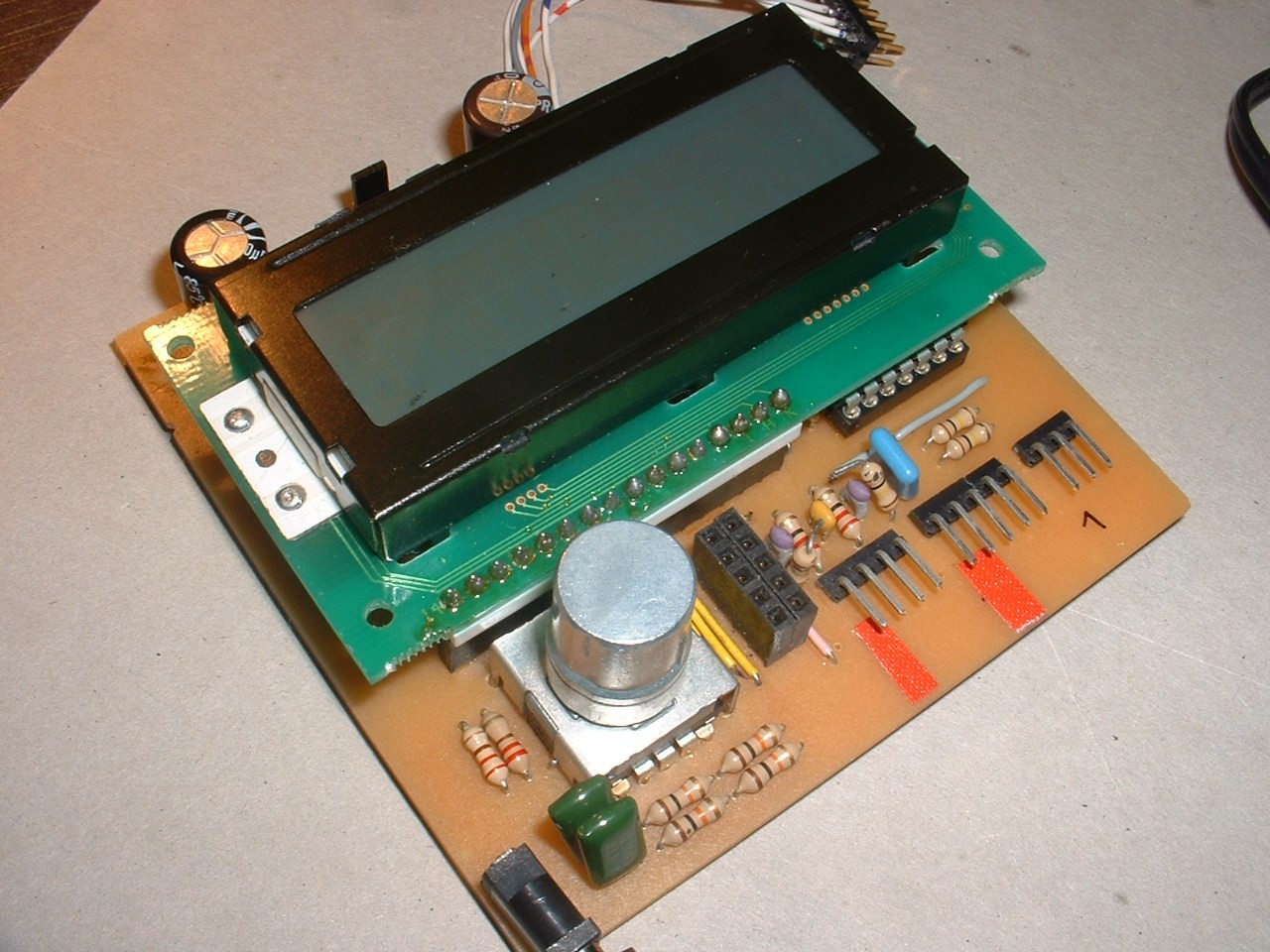
Die Bedienung des Steuergerätes erfolgt teilweise über eien weiteren Drehgeber (das silberne Ding auf der Platine).
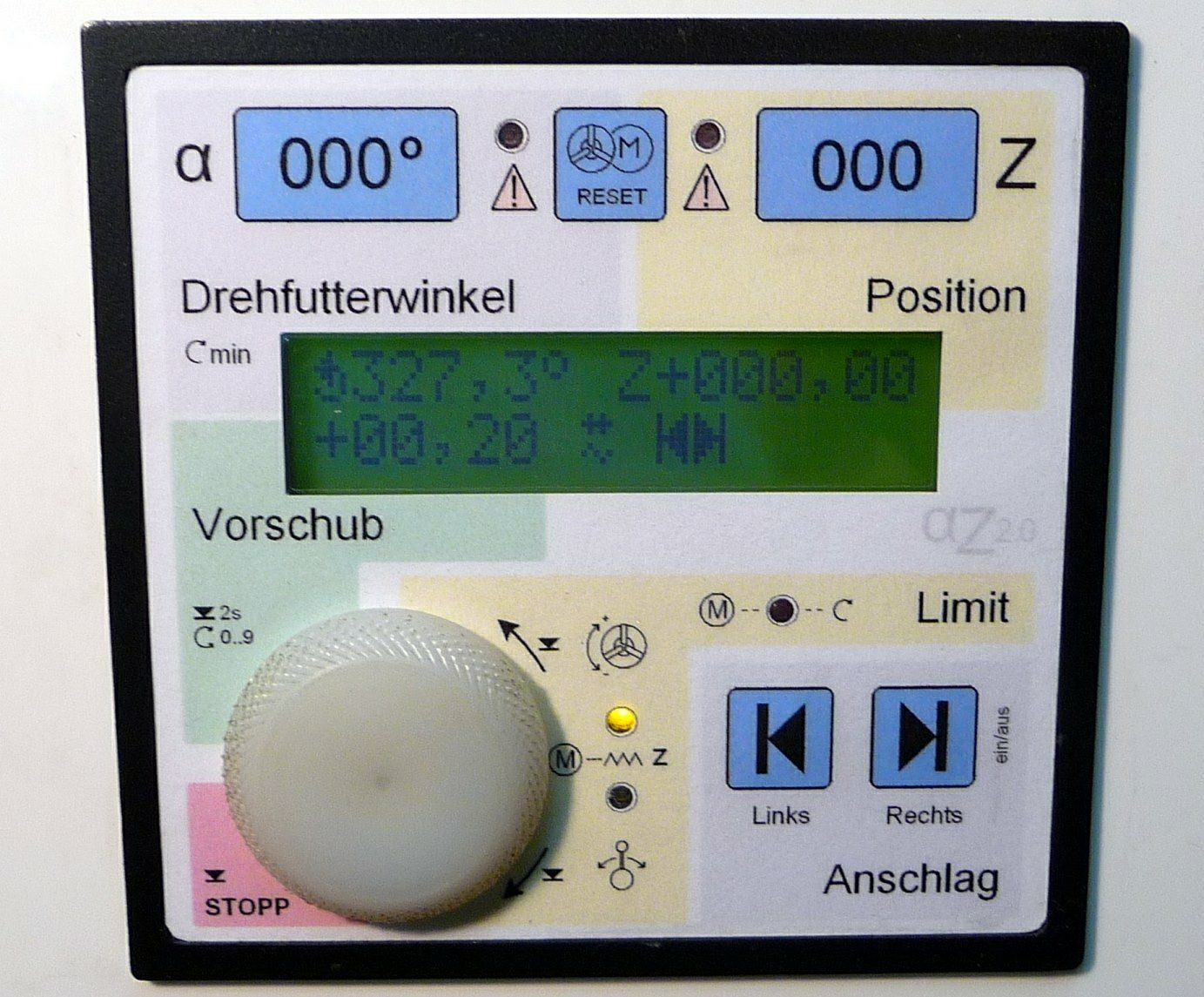
Das LC-Display ist beleuchtet. Die Beleuchtung ist jedoch leicht reduziert (Vorwiderstand), da die Spannungsregelung
ohne große Kühlung erfolgen sollte.

Die Handsteuerung besteht aus einem Pontentiometer mit zwei Mikroschaltern und einer Feder zur Rückstellung in die Mittelposition.
Die Kugel am Griff ist einer mechanischen Computermaus entnommen (die Gummibeschichtung natürlich entfernt).

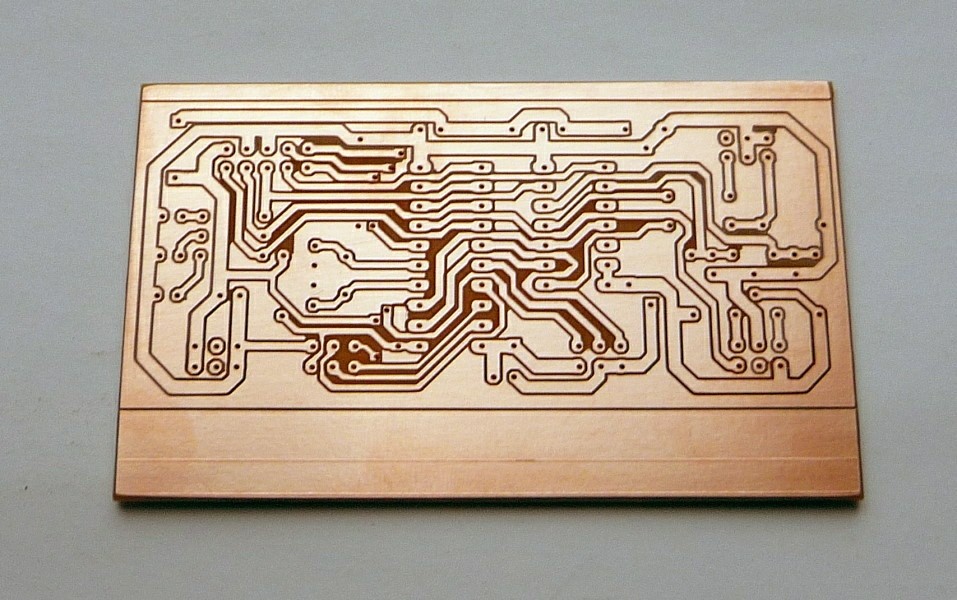
Die Platine ist mit der CNC-Fräse erstellt, also nicht geätzt.


Das Bedienelement ist ein Frästeil aus zwei 3 mm Kunstoffteilen mit Sekundenkleber verbunden.

Das zusammengesetzte und laufende Steuergerät. Die Beschriftung ist, so hoffe ich, selbsterklärend. Ein Reset ist für den
Drehgeber-Encoder (Quadratur Encoder) vorgesehen. Sobald eine unlogische Signalfolge vom Drehgeber eintrifft, wird die Weiterleitung
der Impulse an den Hauptprozessor unterbunden. Der Grund kann eine verschmutzte Segmentscheibe oder eine zu hohe Drehzahl sein.

Damit der Originalzustand der Drehmaschine wieder hergestellt werden kann, habe ich ein neues Abdeckblech
hergestellt. Dazu das originale Blech mit dem Flachbettscanner digitalisiert, nachbearbeitet, ausgedruckt und laminiert.
Mit doppelseitigem Klebeband ganzflächig auf dem neuen Blech verklebt. Damit das Öl der Maschine nicht an den Schnittkanten
in das Papier eindringt, habe ich es mit wasserverdünnten Holzleim versiegelt.
Hier ist die Steuerung eingebaut, aber noch ohne Funktion.

Der Wechsel auf den Servomotorantrieb erforderte eine geänderte Steuereinheit. Die Servomotorsteuerung kann im Vergleich zur
Schrittmotorsteuerung einen Fehler zwischen Soll- und Istposition erkennen. Entsprechende Anpassungen sind am Steuergerät zu erkennen.
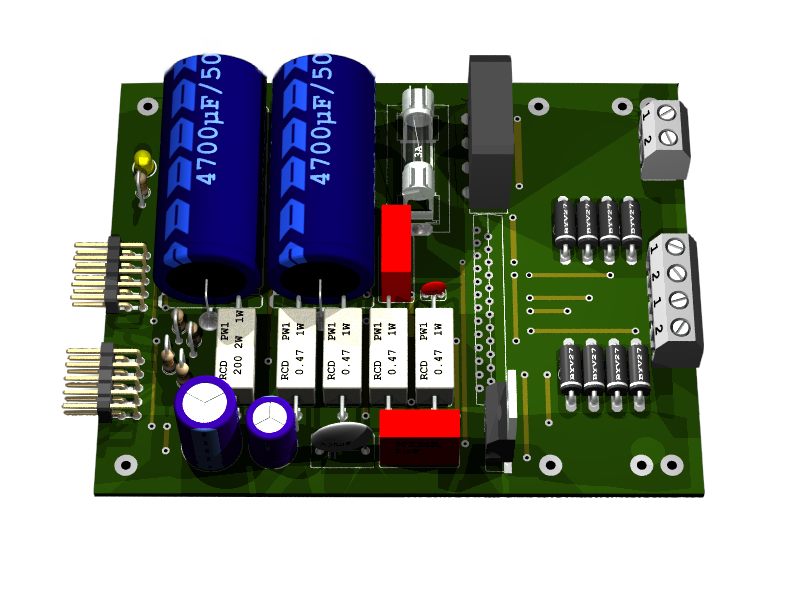
| Motorsteuerung mit Schrittmotor (verworfen) |



Ärger mit dem TB6560AHQ
Die ersten Versuche waren vielversprechend. Die getesteten Motoren liefen
gut. Bei den Experimenten rutschte jedoch ein Motoranschluss aus der Schraubklemme und die Folge war, dass der TB6560AHQ
durchbrannte. Ich hatte davon gehört, dass das IC dies nicht verträgt - dem ist tatsächlich so. Bei weiteren Experimenten mit
dem Reservebaustein fiel mir der laufende Schrittmotor aus einer Höhe von kleiner 10 cm aus der Hand und auf die Tischplatte.
Der entstandene Impuls im Motor zerstörte nun auch meinen Reservebaustein - wieder 10 Euro weg.
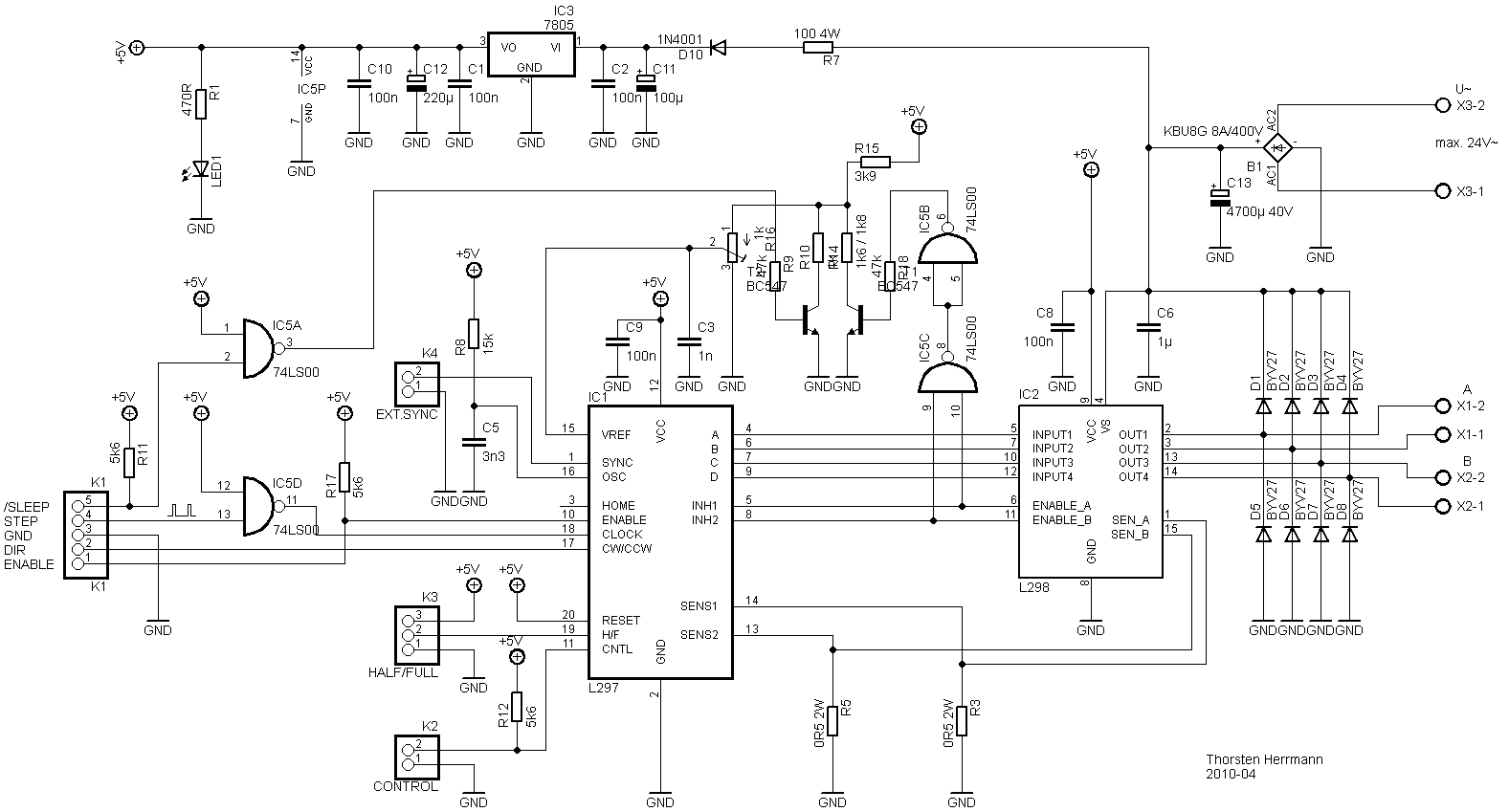
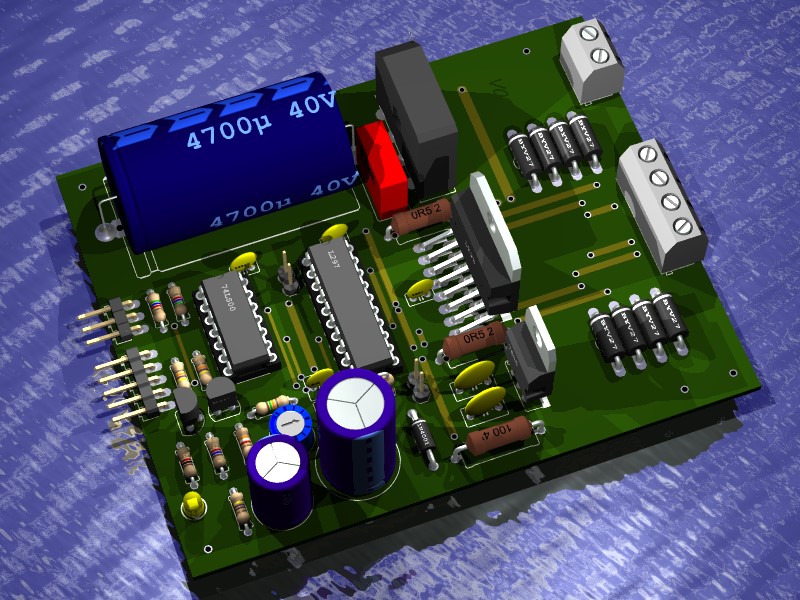
Wer es versuchen will, hier Schaltplan und Platine (Format: Eagle).
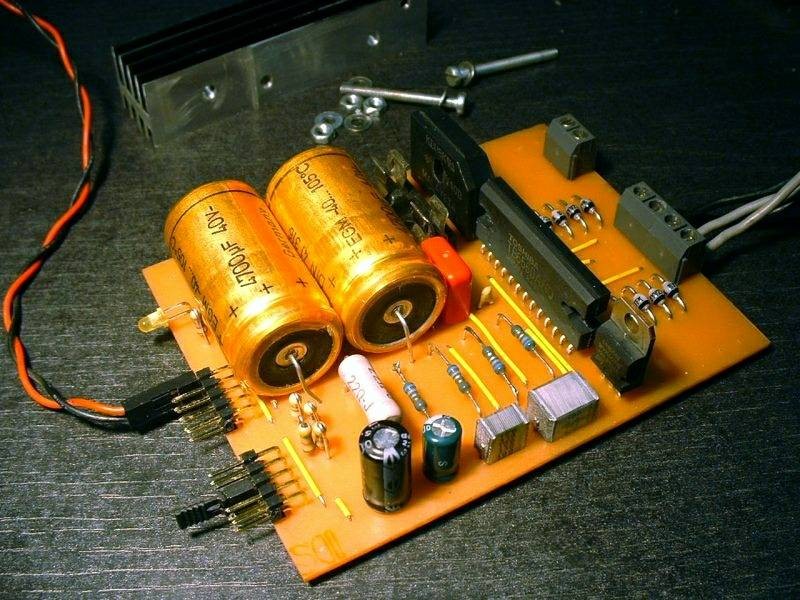
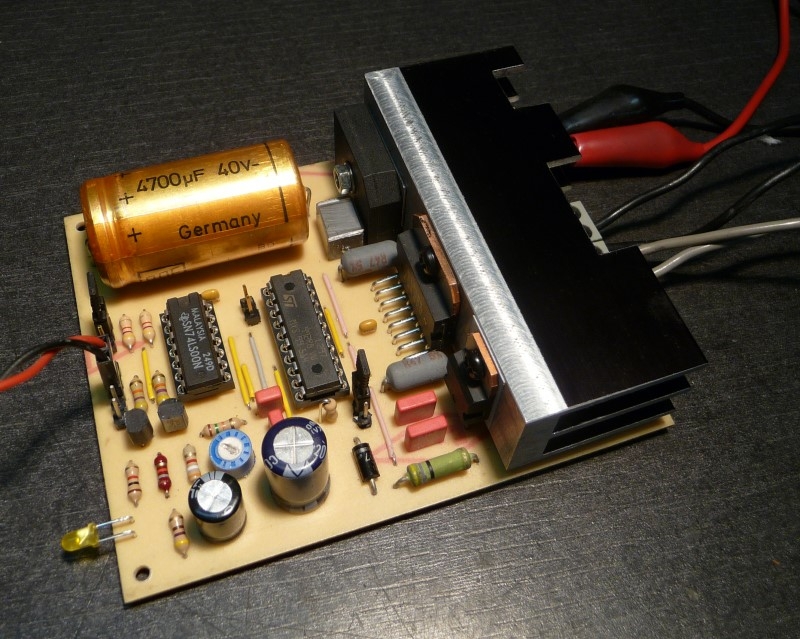
Neuer Versuch mit L297/L298
Die klassische Kombimation aus L297 und L298 in bipolarer Technik ist robust und in meiner CNC-Fräse bereits seit langem
im Einsatz.


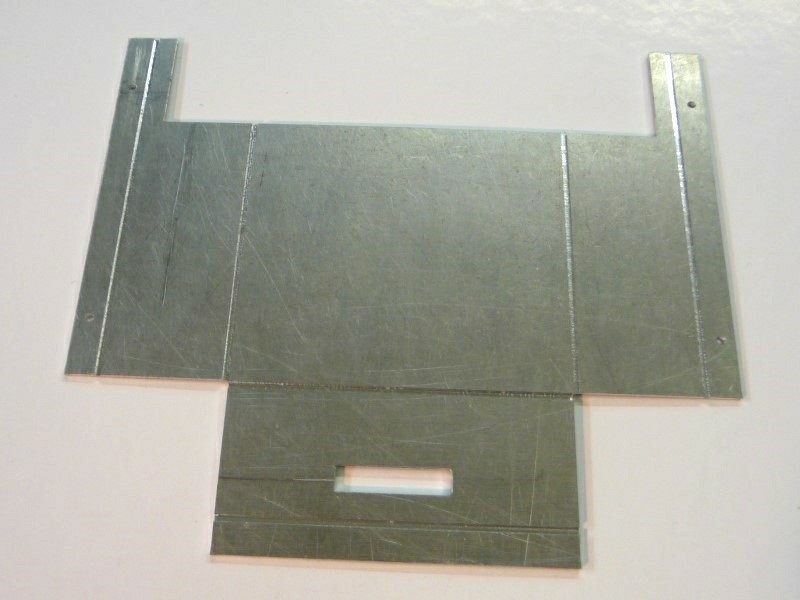
Für das Gehäuse wird ein Aluminiumblech grob zugeschnitten und entsprechend ausgefräst. An den Biegestellen wird nur eine Nut
vorgesehen - das Biegen geht dort anschließend wie von selbst. Die Front- und Rückseite des Netzteilgehäuses besteht aus Teilen
eines alten Audioverstärkers.




Fertig...
| Motorsteuerung (Servomotor) |
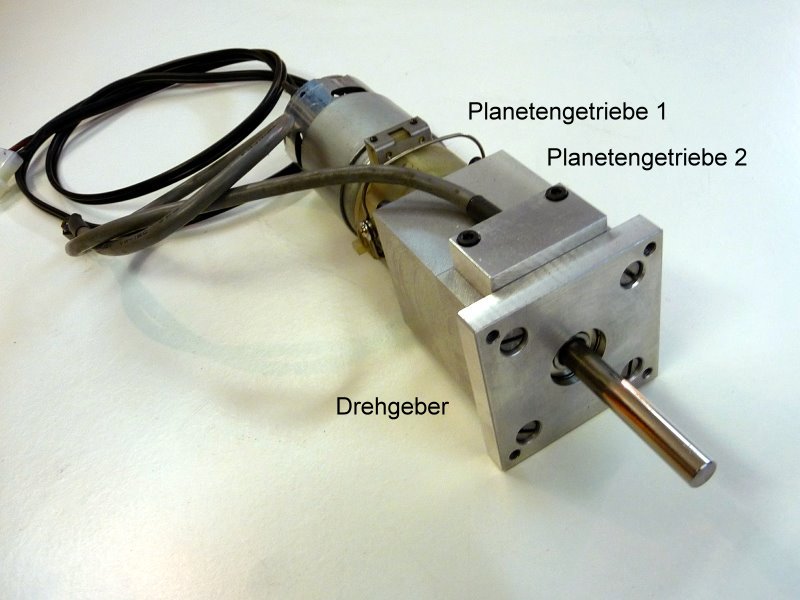
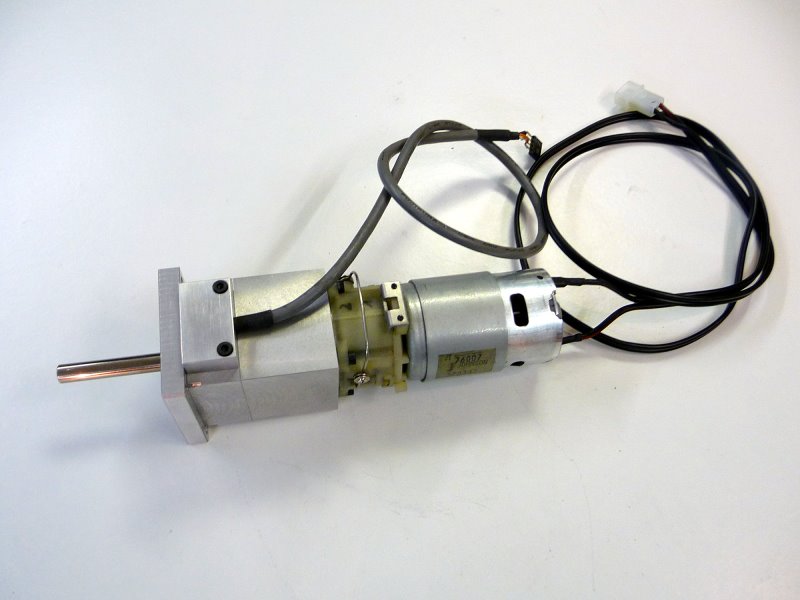
Kollektormotor mit Getriebe und Drehgeber



Motor und Getriebe sind einem Akkuschrauber entnommen. Das Planetengetriebe ist eine Version mit zwei Gängen.
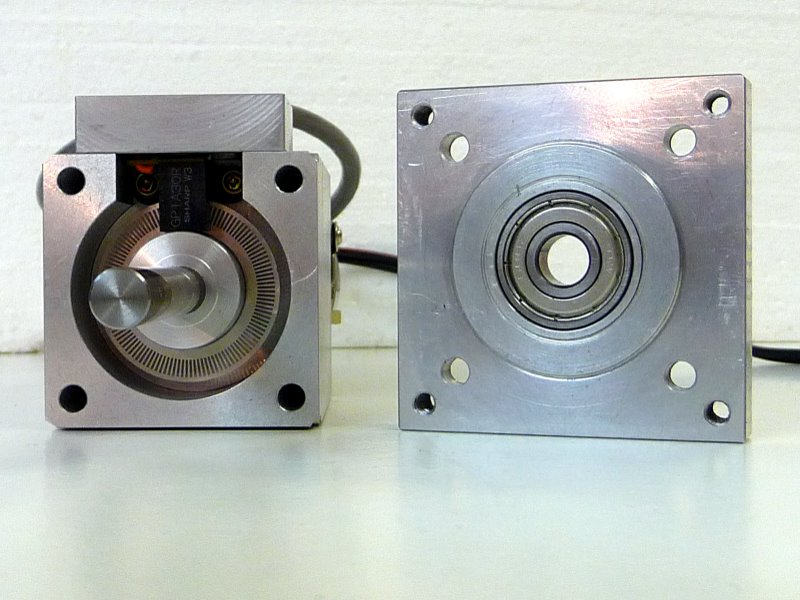
Der vordere Getriebeteil ist in einem Alugehäuse untergekommen, welches zusätzlich ein weiteres Lager und einen
Drehgeber erhalten hat. Ausgangsmaterial für das Aluminiumgehäuse ist ein selbstgegossener Block. Die Drehgebersegmentscheibe
mit Lichtschranke ist aus einem alten Drucker.
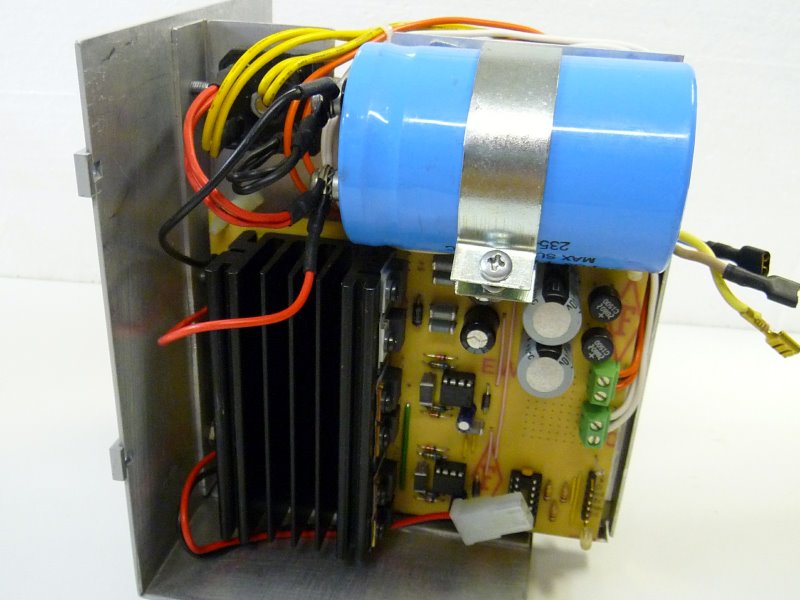
FET-Brücke





Die Brückenschaltung für den Motor ist eine Standardapplikation mit zwei IR2184 und vier FETs. In meiner Version liefert
ein Rinkerntransformator (12V/10A) die Energie für die Motorbrücke und zwei per Hand erstellte Wicklungen (9V, 19V) die
restlichen Spannungen für die Steuerelektronik. Das Gehäuse ist auf meine Drehmaschine zugeschnitten.
DC Servomotor Controller von ChaN
Die Schritt- und Richtungsimpulse der Steuerung müssen mit einem "DC Servomotor Controller" verarbeitet werden.
Dieser erzeugt die Signale für die Brückenschaltung.

Für die Servomotorsteuerung greife ich auf SMC3 von ChaN (Suchmaschine: elm-chan smc3) zurück. ChaN hat viele
großartige Elektronikprojekte auf seiner Internetpräsenz - Dank an ChaN !
Die ersten Experimente mit SMC3 sind vielversprechend (hat man erst einmal die Motorparameter experimentell ermittelt).




| Motor and der Leitspindel |


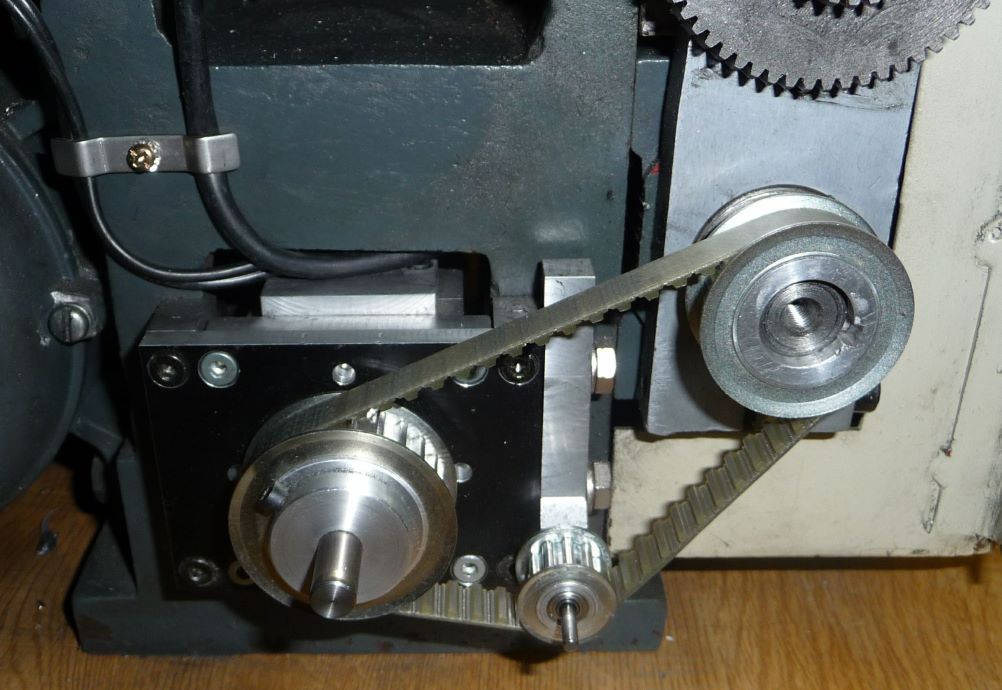
Die Verbindung vom Schrittmotor zur Leitspindel wird über einen Zahnriemen erledigt. Die Untersetzung beträgt 2:1 und die
sich daraus ergebende Auflösung in der Z-Achse 0,005 mm pro Vollschritt. Trotz der Untersetzung kann der kleine
Schrittmotor den Werkzeugschlitten nicht unter Last bewegen.
An dieser Stelle muss ich Motor und Motorendstufe nochmals überdenken - was zu erwarten war...
Das zweite Bild ist die Variante mit Servomotor. Das Übersetzungsverhältnis ist so gewählt, dass eine gerade metrische
Schrittweite entsteht.
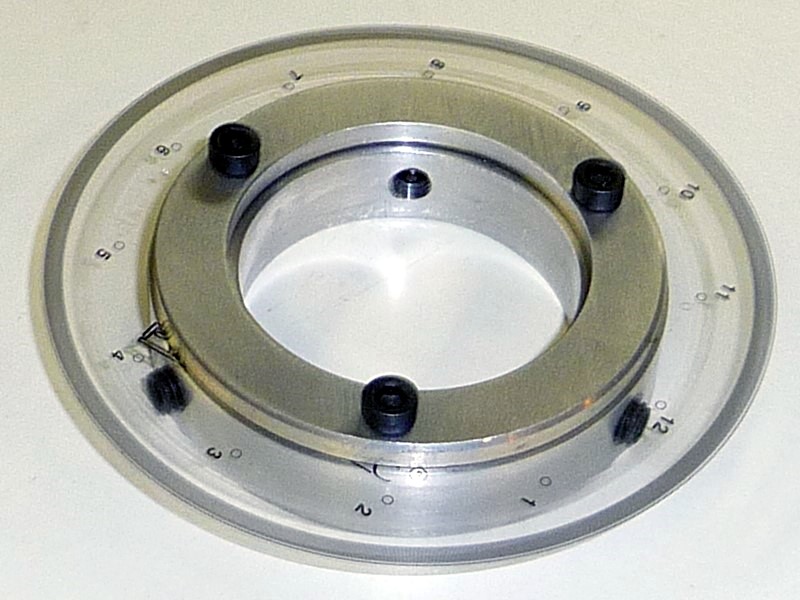
| Drehgeber an der Hauptspindel |




Der Ausbau der Hauptspindel erfordert etwas Mut, ist aber ohne Alternative. Am Ende habe ich sie dreifach aus- und eingebaut.

| Steuerhebel an der Maschine |
 Der Steuerhebel hat sich als sehr nützlich erwiesen.
Der Steuerhebel hat sich als sehr nützlich erwiesen.
Startseite